Baixe Projecto de Veios de Redutor: Análise de Cargas e Esquemas de Forças e outras Esquemas em PDF para Organografia, somente na Docsity!
6. Carregamento dos veios do redutor 1. Determinação das forças nos engrenamentos das transmissões do redutor; 2. Determinação das forças em consola; 3. Construção do esquema de carregamento dos veios.
Os veios dos redutores estão sujeitos a dois tipos de deformações: por flexão e por torção. A deformação por torção surge devido à acção de momentos torsores, provenientes do motor, por um lado, que são contrabalançados pelos momentos de resistência da máquina executiva. A deformação por flexão é causada pelos momentos das forças nas engrenagens ou parafuso sem-fim da transmissão fechada, associadas ao efeito das forças em consola das transmissões abertas e uniões de veios.
6.1 - Determinação das forças nos engrenamentos das transmissões do redutor
Para a projecção de muitos accionamentos usam-se redutores com engrenagens cilíndricas helicoidais, cujos dentes têm ângulo de inclinação β = 8 ... 16º; também se usam redutores cónicos com dentes curvilíneos sendo β = 35º; os redutores de parafuso sem-fim têm ângulo de perfil 2⋅α = 40º, na secção axial (fig. 13.11). O ângulo de pressão no engrenamento é α = 20º. Nas figuras 6.1 ... 6.3 são dados esquemas de forças no engrenamento de transmissões cilíndricas, cónicas e de parafuso sem-fim, para diferentes direcções do ângulo de inclinação dos dentes (ou da hélice da rosca do parafuso sem-fim) e diferentes sentidos de rotação do motor. O ponto de aplicação das forças é escolhido como estando no plano médio da roda dentada (ou parafuso sem-fim).
a) Inclinação de dentes para esquerda na roda movida e para a direita ao pinhão
b) Inclinação dos dentes para direita na roda movida e esquerda no pinhão
Fig. 6.1 – Esquemas de forças em engrenagens cilíndricas com dentes helicoidais
a)
Direcção das linhas dos dentes na roda movida - esquerda Direcção das linhas dos dentes no pinhão - direita
b)
Direcção das linhas dos dentes na roda movida - direita Direcção das linhas dos dentes no pinhão - esquerda Fig. 6.2 - Esquemas de forças no engrenamento de transmissões cônicas com dentes rectos e curvilíneos
a)
Parafuso com rosca esquerda
b)
Parafuso com rosca direita Fig. 6.3 - Esquemas de forças nas transmissões de parafuso sem-fim/coroa
Os valores das forças são determinados usando fórmulas adequadas (tabela 6.1, pp.97). Note-se que � 1 e T 1 têm o mesmo sentido mas T 2 e � 2 têm sentidos opostos.
as fórmulas para a determinação das forças em consola.
Tabela 6.2 – Forças em consola (exteriores aos redutores) Tipo de Valor da força, em N transmissão aberta
Direcção da força (^) Pinhão Roda movida
Tangencial Ft 1 = Ft 2
2
3 2 2
d
T
Ft
Cilíndrica com dentes rectos
Radial
Fr 1 = Fr 2 Fr^ 2 =^ Ft 2 ⋅ tg^ α
Tangencial
Ft 1 = Ft 2
2
3 2 2
e
t
d
T
F
Radial Fr 1 = 0 , 36 ⋅ Ft 1 ⋅cos δ 1 Fr 2 = Fa 1
Cónicas com dentes rectos
Axial Fa 1 = 0 , 36 ⋅ Ft 1 ⋅ sen � 1 Fa 2 = Fr 1
Por correias planas Radial^
Fab 2 F 0 sen^1
Por correias trapezoidais Radial^
Fab 2 F 0 z sen^1
Por correias multi-V Radial^
Fab 2 F 0 sen^1
Por cadeias Radial Fab = 2 ⋅ F 0 + ki ⋅ Ft ;
ki = 1,15 para inclinação até 40º; ki = 1,05 para inclinação de 40 até 40º Uniões de veios
Radial Veio de alta velocidade Veio de baixa velocidade
Funi 1 = 50 ⋅ T 1 ... 125 ⋅ T 1 Funi 2 = 125 ⋅ T 2 - redutor
de engrenagens
Funi 2 = 250 ⋅ T 2 - redutor
de parafuso sem-fim
Notas:
- Os momentos são expressos em N⋅m, os diâmetros em mm, as forças em N. Os valores dos diâmetros são expressos em mm. As forças nas uniões dependem do tipo de união mas o seu valor é, inicialmente, aproximado usando as fórmulas dadas. O valor real só pode ser determinado após a escolha da união. O índice “ab” indica as forças em consola sobre os veios, que surgem numa transmissão aberta. Nalgumas transmissões esta força indica-se como Fveio ou Fr (de “resultante”, não “radial”). Para transmissões com elemento flexível são simplesmente as forças resultantes nos ramais do elemento flexível, mas para engrenagens podem ser decompostas em forças radiais e tangenciais.
- T 2 , para as transmissões por engrenagens abertas, é o momento torsor no veio da máquina executiva onde está montada a roda dentada, em N·m; T 1 e T 2 , para as uniões, são os momentos torsores nos veios de entrada e de saida do redutor, respectivamente,
em N·m; d 2 é o diâmetro divisor da engrenagem cilíndrica movida, em mm; de2 é o diâmetro divisor externo da roda dentada cónica movida, em mm; δ 1 é o ângulo do cone divisor do pinhão, em graus.
6.3 – Esquema de carregamento dos veios do redutor
O esquema de carregamento dos veios destina-se a auxiliar a determinação das forças nos engrenamentos dos pares do redutor, as forças em consola da transmissões abertas, e uniões de veios, as reacções nos apoios e as direcções dos momentos torsores e velocidades angulares dos veios. O esquema de carregamento dos veios deve ser feito em papel milimétrico de formato A4. Também se pode utilizar o desenho assistido por computador para auxiliar na execução desta tarefa, mas a impressão é feita utilizando o formato A4. O esquema de carregamento deve conter:
- o nome do esquema, no topo;
- o esquema de forças nos veios e elementos da transmissão, em isometria;
- a indicação do sistema de coordenadas utilizado, com os eixos X, Y e Z
- legenda, forma 2a, figura 14.1;
- tabela de forças, momentos e parâmetros cinemáticos das transmissões;
(ver os exemplos das figuras 6.4 ... 6.6).
A ordem recomendada para a construção dos esquemas de forças é a seguinte:
- Designa-se a disposição dos elementos do esquema de forças segundo o esquema cinemático do accionamento (dado na tarefa);
- Coloca-se, arbitrariamente, a representação dos eixos axonométricos X, Y e Z, sob ângulos mútuos de 120º; os vectores das forças no engrenamento, as forças em consola e as reacções nos apoios dependem das direcções do eixos escolhidos. É possível usar cores para alguns efeitos.
- Desenham-se os veios, apoios, par(es) do redutor, elementos das transmissões abertas e uniões de veios utilizando símbolos convencionais (tabela 6.3). As dimensões dos elementos desenhados são arbitrárias mas devem observar-se as proporções entre eles (por exemplo, no par em engrenamento deve ser óbvia qual é a roda maior). É preciso marcar os apoios com letras A e B (para o veio de entrada), C e D para o segundo veio e assim por diante, etc.
confira o movimento que se requer do mecanismo. Se o mecanismo tiver movimento reversível então o sentido de rotação dos veios de alta e baixa velocidade pode se arbitrado. Nos accionamentos de redutor cónico com pinhão de dentes inclinados para a direita a direcção de rotação do veio deve ter sentido horário, se o veio for observado do lado do vértice do cone divisor do pinhão (fig. 6.2). A força axial que surge no pinhão Fa1 é direccionada no sentido da base do cone divisor o que evita a gripagem dos dentes durante o funcionamento.
- Determina-se a direcção das forças no engrenamento do par do redutor segundo a direcção da linha helicoidal escolhida e a rotação dos veios. No pinhão (ou parafuso sem-fim) estas forças são Ft1, Fr1, Fa1 e na roda movida Ft2, Fr2 e Fa2 (veja as figuras 6.1 ... 6.3). As forças Ft1 e Ft2 são direccionadas de tal modo que os seus momentos possam equilibrar os torques T 1 e T 2 aplicados aos veios do redutor, tanto da parte do motor e como da reacção da máquina (repare-se que as interacções entre os elementos da transmissões são substituidas por forças e por isso Ft1 é a força tangencial com que a roda 2 reage à roda 1 e não a força que o torque T 1 imprime sobre a roda 2). Assim, Ft1 tem sentido contrário ao da rotação do pinhão e Ft2 tem o sentido de rotação da roda movida.
- Determinam-se os sentidos das forças em consola nas extremidades salientes dos veios (figuras 6.4 ... 6.6)
a) O sentidos das forças das transmissões abertas determinam-se de modo similar ao das transmissões dos redutores;
b) As forças em consola das transmissões por correia e por cadeia Fab são perpendiculares ao eixo geométrico do veio em consideração e são dispostas em função da posição da transmissão no esquema cinemático do accionamento, podendo ser verticais, horizontais ou inclinadas sob qualquer ângulo em relação ao plano horizontal. Se a tarefa do projecto especificar uma transmissão inclinada sob um ângulo θ (fig 6.4), a força Fab deve ser decomposta nas componentes Fy (vertical) e Fx (horizontal). Os seus valores numéricos determinam-se usando relações trigonométricas (fig. 8.1).
c) A força em consola de uniões de veios Funi é perpendicular ao eixo do veio mas a sua direcção relativamente a Ft pode ser qualquer, dependendo da imprecisão de montagem da união. Por isso, recomenda-se que o sentido da força na união seja tal que constitua o pior caso de carregamento dos veios, isto é, a força na união é escolhida de forma a piorar ao máximo o efeito das outras forças. Assim, é comum escolher-se para Funi um sentido contrário ao da força tangencial Ft o que aumenta a deformação do veio.
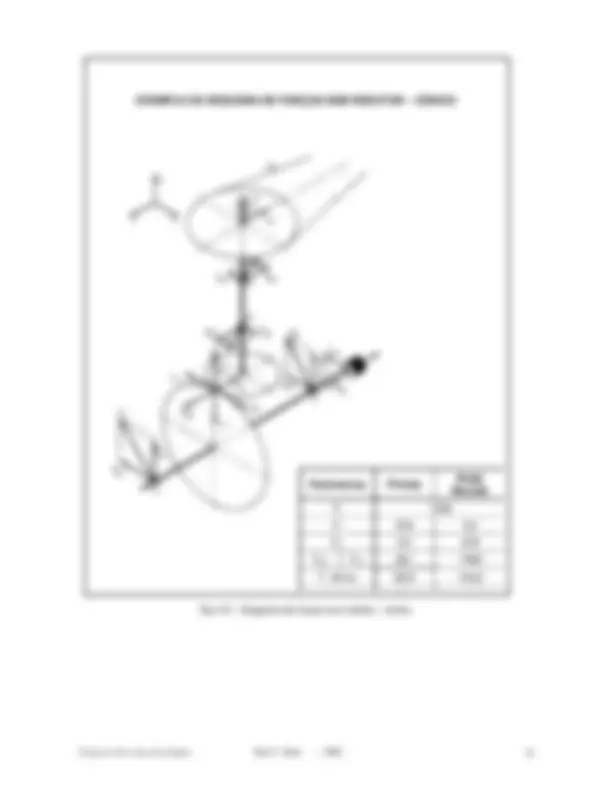
� Fig. 6.4 – Esquema de forças num redutor - cilíndrico
� Parâmetros Pinhão Roda Movida Ft 754 Fr 279 Fa 126 Fun Fab 198 799 T (N⋅m) 15,8^ 60, ω (rad/s) 99,48^ 24,
EXEMPLO DE ESQUEMA DE FORÇAS NUM REDUTOR – CILÍNDRICO
� � �
� Fig. 6.6 – Esquema de forças num redutor – parafuso sem fim/coroa
Trans. PSF Trans. ECDR Parâmetros PSF R.Coroa Pinhão R.Movida Ft 390 1862 4400 Fr 678 1602 Fa 1862 390 − − Funi 143 − − − T (N⋅m) 8,2 176,2 176,2 1160 ω (rad/s) 97,40 3,60 3,60 0,
� EXEMPLO DE ESQUEMA DE FORÇAS NUM REDUTOR – PARAFUSO SEM FIM/COROA
- Determinam-se os sentidos das forças de reacção dos apoios, na direcção radial. Para os veios de alta e baixa velocidade as reacções devem ser posicionadas de forma a serem opostas aos sentidos das forças tangenciais (Ft1, Ft2 ) e às forças radiais (Fr1, Fr2) do redutor. Os pontos de aplicação das reacções nos apoios situam-se tipicamente a meio da largura de cada apoio. As reacções devidas às forças em consola são somadas às reacções devida às forças no interior do redutor. As reacções são representadas pela letra R, com um índice. O índice comporta o nome do apoio e a direcção do eixo da reacção, segundo o sistema de coordenadas escolhido. São exemplos deste tipo de designação: RAx, RBy, RCz, etc.
- Determina-se a direcção da soma das reacções nos apoios como soma geométrica da reacções radiais nos planos vertical e horizontal, usando o método do paralelogramo ou relações trigonométricas. O índice da soma da reacções contém apenas a designação do apoio, por exemplo, RA, RB.
- Compõe-se a tabela de resultados. A forma da tabela depende do tipo de transmissões que compõem o accionamento, tal como nos exemplos 6.4 ... 6.6. 7. Cálculo projectivo dos veios. Composição do esboço do redutor
As actividades do cálculo projectivo dos veios dos veios e composição esquemática do redutor podem ser alistadas como se segue:
1 – Escolha dos materiais dos veios;
2 – Escolha das tensões admissíveis à torção;
3 – Determinação do parâmetros geométricos dos escalões dos veios;
4 – Escolha preliminar dos apoios (rolamentos);
5 – Composição do esboço do redutor.
Os principais critérios de capacidade de trabalho utilizados para a projecção dos veios dos redutores são a resistência mecânica e a resistência à fadiga. Os veios estão sujeitos a deformações complexas, por influência da torção, flexão e tracção (compressão). Porém, a tensão devida aos esforços de tracção/compressão é muito menor que as tensões devidas aos momentos torsores e flectores. Assim, é escusado considerar o efeito dos esforços de tracção/compressão no cálculo dos veios. O cálculo dos veios dos redutores faz-se em duas (ou mais) etapas. A primeira etapa é para o cálculo projectivo (aproximado), que se baseia na resistência dos veios à torção pura e a segunda para o cálculo testador. No cálculo testador verifica-se a resistência à flexão e à torção. Este cálculo determina a resistência do veio à fadiga e considera a concentração de tensões devida à forma do veio. O parâmetro de cálculo mais importante é o coeficiente de segurança à fadiga.
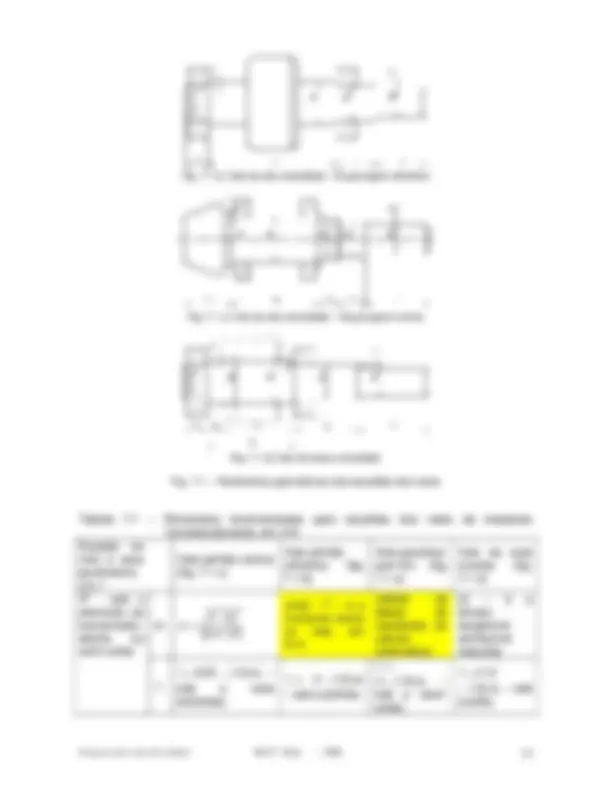
Fig. 7.1 b) Veio de alta velocidade – Engrenagem cilíndrica
Fig. 7.1 c) Veio de alta velocidade – Engrenagem cónica
Fig. 7.1 d) Veio de baixa velocidade
Fig. 7.1 – Parâmetros geométricos dos escalões dos veios
Tabela 7.1 – Dimensões recomendadas para escalões dos veios de redutores monoescalonares, em mm Escalão do veio e seus parâmetros d e �
Veio-pinhão cónico (fig. 7.1 c)
Veio-pinhão cilíndrico (fig. 7.1 b)
Veio-parafuso sem-fim (fig. 7.1 a)
Veio da roda movida (fig. 7.1 d)
1º - sob o elemento da transmissão aberta ou semi-união
d 1
[ ]
3
3 (^1 0) , 2
T
d
onde : T – é o momento torsor no veio, em N·m
(obtido da tabela de resultados do cálculo cinemático)
[τ] – é a tensão tangencial admissível reduzida
� 1 =(0,8 ...1,5)⋅d 1 – sob a roda estrelada;
� 1 = (1...1,5)⋅d 1
(1...1,5)⋅d 1 – sob a semi- união;
...1,5)⋅d 1 – sob a polia;
Escalão do veio e seus parâmetros d e �
Veio-pinhão cónico (fig. 7.1 c)
Veio-pinhão cilíndrico (fig. 7.1 b)
Veio-parafuso sem-fim (fig. 7.1 a)
Veio da roda movida (fig. 7.1 d)
2º - sob a tampa com vedante e rolamento
d 2
d (^) 2 = d 1 + 2 ⋅ t - só sob o vedante
d (^) 2 = d 1 + 2 ⋅ t
� 2 ≈ 0 , 6 ⋅ d 4 - só sob o vedante 2 2
� ≈ 1 , 5 ⋅ d � 2 ≈ 1 , 25 ⋅ d 2
3º - sob o pinhão ou roda movida
d 3
d (^) 3 = d 4 + 3 , 2 ⋅ r ; é possível que
d 3 ≤ dfe
d (^) 3 = d 2 + 3 , 2 ⋅ r ; é possível que
d 3 ≤ dfe1;
para d 3 > da adopta-se d 3 = da
d (^) 3 = d 2 + 3 , 2 ⋅ r
� 3 obtém-se graficamente, na composição esboçada do redutor 4º - sob o rolamento d^4
d (^) 4 = d 5 +( 2 ... 4 ) mm d (^) 4 = d 2
� determina-se graficamente
� 1 =B – para rolamentos de esferas; � 1 =T para rolamentos de rolos cónicos
5º - de encosto ou sob a rosca
d 5
d 5 sob a rosca determina-se como função de d (^) 2 , segundo a tabela
Não se constrói
� 5 � 5 ≈ 0 , 4 ⋅ d 4
� 5 determina- se graficamente Notas:
- Os valores das alturas dos ressaltos t , os valores aproximados dos chanfros f dos escalões e os raios de curvatura dos chanfros dos apoios dependem do valor do diâmetro do escalão d.
d 17...24 25...30 32...40 42...50 52...60 62...70 71... t 2 2,2 2,5 2,8 3 3,3 3, r 1,6 2 2,5 3 3 3,5 3, f 1 1 1,2 1,6 2 2 2,
- Para o diâmetro d 1 da extremidade do veio de alta velocidade que se liga ao veio do motor por uma união, deve-se seguir a relação: d (^) 1 = ( 0 , 8 ... 1 , 2 )⋅ dme , onde dme é o
diâmetro do veio do rotor do motor eléctrico.
- Os diâmetros d 2 e d 4 sob os rolamentos arredondam-se para valores correspondentes aos diâmetros dos anéis internos dos rolamentos d.
Transmissão
Veio de ... veloc.
Tipo de rolamento Série Ângulo^ de contacto
Esquema de montagem Radial-axial, de esferas, tipo 46000; de rolos cónicos, do tipo 27000; radial de esferas, de uma fila, para aw>160 mm
2 (com um apoio fixo)
Alta De rolos cónicos, do tipo 7000 ou radial-axial de esferas, do tipo 36000, para aw≤ 160 mm
Média
De parafuso sem-fim
Baixa
De rolos cónicos, do tipo 7000
Ligeira
α=11...16º para o tipo 7000 α=25...29º para o tipo 27000 α=12º para o tipo 36000; α=26º para o tipo
3, dois apoios fixos, veio comprimido
7.5 Composição do esboço do redutor
A composição do esboço do redutor determina as posições das rodas dentadas no par do redutor, elementos da transmissão aberta e uniões dos veios relativamente aos apoios. Nesta composição também se determinam os comprimentos entre os pontos de aplicação das reacções nos apoios do veios de alta e baixa velocidade do redutor, “ lalta ” ( l �) e “ lbaixa ” ( lT ), respectivamente. Também se determinam as distâncias entre os pontos de aplicação das forças dos elementos da transmissão aberta ou uniões de veios e o ponto de aplicação da reacção no apoio mais próximo, que e designam “ lab ” ( lo �) e “ luni ” ( lM ), respectivamente. Entre parênteses apresentam-se os símbolos usados em alguns desenhos. A composição do esboço do redutor é feita a lápis numa folha de papel milimétrico de formato A1/A2, na escala 1:1, ou utilizando meios informáticos equivalentes. Usam-se linhas de contorno. A execução do esboço do redutor deve conter:
- a representação do esboço do redutor em duas projecções;
- tabelas de dimensões dos escalões dos veios, apoios e outras distâncias;
- legenda principal, forma 1 (figs. 7.2 ... 7.4, A1 ... A18, tab. 14.1 ... 14.2).
Fig. 7.2 – Esboço do corpo redutor cilíndrico
A ordem recomendada para a composição do esboço do redutor é a seguinte:
- Assinalam-se as disposições da projecção da composição segundo o esquema cinemático do accionamento e as dimensões máximas das rodas dentadas;
- Traçam-se linhas de projecção e as linhas de eixo dos veios. Nos redutores cilíndricos e de parafuso sem-fim os eixos dos veios são traçados à distância mútua igual à distância interaxial. Nos redutores cilíndricos os eixos são paralelos e nos redutores de parafuso sem-fim os eixos são cruzados em 90º. Nos redutores cónicos os eixos dos veios são concorrentes e fazem um ângulo de 90º (nas transmissões ortogonais).
- Desenha-se o par do redutor de acordo com os parâmetros geométricos obtidos
escalões, que se determina tendo em vista a construção dos rolamentos. Estes escalões são posicionados de tal modo que, na face interna do alojamento dos rolamento haja uma espessura S=(0,1 ... 02,)⋅D até à ao contorno interno do corpo do redutor que se situa perto das extremidades do dentes da roda-coroa. Este contorno é um arco que tem raio R=0,5⋅daM2 + x. O diâmetro do alojamento para o rolamento depende da dimensão do anel externo deste, que é extraído de tabelas de parâmetros de rolamentos. Os outros escalões desenham-se de modo análogo aos escalões do veio de baixa velocidade.
Fig. 7.
- No 2º e 4º escalões desenham-se os contornos dos rolamentos usando as dimensões d, D, B (T,c para rolamentos de rolos cónicos) segundo o esquema de montagem (ver a tabela 7.2). Para os rolamentos de rolos cónicos
� �
≈ ⋅�^ −
1 D d h. Os contornos desenham-se com linha contínua grossa e as
diagonais cruzadas com linha contínua fina.
- Determinam-se os comprimentos lalta e lbaixa entre os pontos de aplicação das reacções nos rolamentos dos veios de alta e baixa velocidade, respectivamente. A reacção radial R no rolamento considera-se aplicada no ponto de intersecção entre a normal traçada a partir do ponto médio da superfície de contacto do anel exterior com o corpo rodante e o eixo de rotação do veio (v. fig. 7.6). Se a superfície de contacto entre o corpo rodante e o anel exterior estiver inclinada, o ponto de aplicação da reacção no apoio localiza-se num plano diferente do plano que contém os lugares geométricos dos pontos médios das linhas de contacto entre os corpos rodantes e o anel externo do rolamento. Segundo o exposto: a) para rolamentos radiais o ponto de aplicação da reacção está no plano axial médio do rolamento; a distância entre apoios é determinada segundo o esquema da figura 7.6 c) por: � = L − B ; b) para rolamentos radiais-axiais o ponto de aplicação da reacção está deslocado do plano axial médio do rolamento; a distância “ a” entre a face do anel externo do rolamento e o ponto de aplicação da reacção pode ser determinada usando as figuras 7.6 a) e b) :
a = ⋅�^ B + d + D ⋅ tg α
0 , 5 - para rolamentos de esferas de contacto
angular unifilares
� �
a = ⋅�^ T + d + D ⋅ e 3
0 , 5 - para rolamentos de rolos, unifilares.
Onde: d, D, B, T – são diâmetros e larguras tabeladas do rolamento; α - é o ângulo de contacto; e – é o factor de carga axial (tabelado);
Para a montagem dos rolamentos no esquema 3 (fig. 7.6 a) ), em que os rolamentos tendem a comprimir o veio (montagem em X) tem-se:
�= L − 2 ⋅ a
Para a montagem dos rolamentos no esquema 4 (fig. 7.6 b) ), em que os rolamentos tendem a esticar o veio (montagem em O) tem-se:
�= L + 2 ⋅ a
Para montagem dos rolamentos segundo os esquema 2, a reacção do apoio que é composto por um par de rolamentos radiais-axiais de uma fila opostos, num dos lados (v. figs. 10.18, A6, A8)), está posicionada a meio do par de rolamentos. O outro apoio é flutuante e só tem reacção na direcção radial. A distância entre apoios vai da face do rolamento flutuante às faces de junção dos rolamentos axiais-radiais mas é reduzida no valor de meia largura do rolamento flutuante:
�= L − 0 , 5 ⋅ B
- Determinam-se os pontos de aplicação das forças em consola:
a) para transmissões abertas – a força dos ramais das correias ou da cadeia sobre os veios (Fv ou Fab), força no engrenamento das transmissões por rodas dentadas Ftab, Faab e Frab são consideradas como tendo o seu ponto de aplicação a meio do comprimento do escalão da extremidade do veio em que se monta o cubo da polia, roda estrelada ou roda dentada, a uma distância lab do apoio mais próximo (figs. 7.2 ... 7.4); Os índices tab , aab e rab indicam tangencial , axial e radial na transmissão aberta, respectivamente; b) a força da união Funi está aplicada entre as semi-uniões (figs. 10.1...10.3); por isso, pode-se considerar que o ponto de aplicação da força Funi está situado a uma distância luni do apoio mais próximo igual ao comprimento em consola do veio, i.e. , à distância que vai desde apoio dado à da face na extremidade do veio (figs. 7.2 ... 7.4).
- Colocam-se as dimensões necessárias na composição do esboço, preenche-se a tabela e a legenda principal.
- Compõe-se a tabela de resultados (tabela 7.3).