


Sistemas Operacionais
de Tempo Real
Wellington Cássio
Pâmela Raiane
Jéssica Luiza
Sebastião Realino






Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Os melhores documentos à venda: Trabalhos de alunos formados
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
Comunidade
Peça ajuda à comunidade e tire suas dúvidas relacionadas ao estudo
Descubra as melhores universidades em seu país de acordo com os usuários da Docsity
Guias grátis
Baixe gratuitamente nossos guias de estudo, métodos para diminuir a ansiedade, dicas de TCC preparadas pelos professores da Docsity
Apresentação Sistemas Operacionais de Tempo Real
Tipologia: Notas de estudo
1 / 16

Esta página não é visível na pré-visualização
Não perca as partes importantes!
Como Surgiu os RTOS?
Conceitos:
Para entendimento da importância de um
Sistema de Tempo Real é precisamos entender
alguns conceitos de restrição de tempo para
eventos e tarefas computacionais.
Os quais são:
Restrições de Tempo:
Toda tarefa computacional recebe um
estímulo (ou evento) , que pode ser interno ou
externo, realiza o processamento e produz uma
saída. Um evento com restrição de tempo possui
um tempo limite (máximo) de processamento
para que sua saída seja gerada.
Tarefas:
Tarefas são pequenos trechos de programa
com responsabilidades específicas e bem
definidas.
Cada tarefa possui um conjunto de atribu-
tos, dentre eles a prioridade , que deve ser
atribuída de acordo com sua importância.
É a partir desta prioridade que tentamos
garantir com que eventos com restrições de tempo
possam ser executados de forma eficiente.
Tarefas:
Exemplo:
Podemos citar como exemplo a leitura de
sensores, tratamento de protocolos de comuni-
cação, leitura de teclado, acionamento de leds
indicativos, escrita em displays, comunicações seri-
ais e log de informações.
Portanto, um Sistema de Tempo Real é
modelado através da divisão da aplicação em um
conjunto de pequenas tarefas , com funções
específicas, e que interagem entre si.
Interações entre Tarefas:
Exemplo:
Supondo que um sensor de movimento tenha sido acionado, a tarefa 1 irá detectar esse acionamento, e precisa notificar a tarefa 4. Esta notificação é feita através do envio de uma mensagem para a tarefa
Outro meio de comunicação entre as tarefas são os semá- foros. Enquanto uma tarefa utiliza um dado recurso pode bloquear um semáforo; outra tarefa antes de utilizar esse recurso verifica o estado do semáforo, e se estiver bloqueado, não utiliza o recurso.
Escalonamento de Tarefas:
Para atender todas as tarefas solici-
tadas, dentro de suas respectivas restrições
de tempo , o Kernel necessita de algum
mecanismo de gerenciamento de tarefas,
classificando-as e ordenando de acordo com
sua prioridade.
O escalonamento de tarefas é uma
função realizada pelo Kernel para determinar
quando uma tarefa mais importante precisa
ser executada.
Requisitos para Operação:
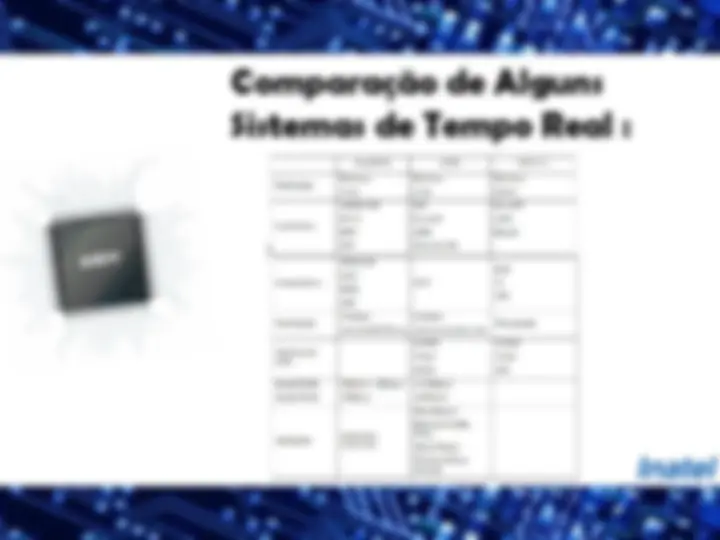
RTOS disponíveis no mercado :
Cada RTOS disponível no mercado possui
vantagens e desvantagens. A escolha do melhor
sistema depende dos requisitos de hardware e
software do produto.