Baixe Acionamento MCC e outras Notas de estudo em PDF para Engenharia Elétrica, somente na Docsity!
Acionamentos Elétricos 1
UnilesteMG – Centro Universitário do Leste de Minas Gerais
Departamento de Engenharia Elétrica
Disciplina: Acionamentos de Máquinas - Dinâmica de máquinas cc****.
Professor: Genésio Gomes Diniz
Introdução
Os motores de corrente contínua ainda são largamente usados em acionamentos
à velocidade variável, e apresentam características muito particulares, como
simplicidade de equacionamento e modelagem e controle relativamente simples. A
comutação permite um desacoplamento entre as variáveis de fluxo principal e
corrente de armadura, responsáveis diretos pelo conjugado, mantendo-os em
ortogonalidade. Entretanto outros fatores também inerentes à maquina dc devem
ser levados em conta. O alto custo de fabricação, manutenção e algumas
características de difícil modelagem como as tensões de contato das escovas,
pesam na escolha de uma nova aplicação. Algumas aplicações que exigem muita
precisão, como em máquinas operatrizes, ainda prevalece, em alguns aspectos,
os motores de corrente contínua.
Na máquina de corrente contínua o enrolamento de campo pode ser conectado de
diferentes maneiras em relação ao enrolamento de armadura: em série (as
correntes de campo e de armadura são iguais); em paralelo (as tensões de campo
e a tensão terminal, Vt, de armadura são iguais) e independente. Embora
historicamente tenha se utilizado em grande escala a conexão série para
aplicações em tração, devido ao alto torque de partida que produz, com o advento
dos conversores eletrônicos de potência passou-se a utilizar a excitação
independente, em virtude da maior flexibilidade que apresenta em termos do
controle da MCC.
Acionamentos Elétricos 2
Acionamentos em corrente contínua
Drives trifásicos
Os acionamentos em cc de altas e médias potências são, normalmente,
alimentados por fontes trifásicas. Nestes, os motores cc são acionados por
conversores por conversores que controlam a tensão média disponibilizada em
seus terminais.
Dentre as configurações possíveis pode-se destacar os conversores em ponte
totalmente controlada e os conversores Dual (ou bidirecional).
Acionamentos Elétricos 4
Nesta configuração permite-se a condução unidirecional da corrente com inversão
da tensão, possibilitando a operação em dois quadrantes. Caracteriza-se por
ripple na tensão e corrente praticamente contínua, devido à indutância da carga. A
frenagem ocorre de acordo com a potência regenerativa do sistema mecânico.
A tensão média nos terminais do conversor é dada por:
α= α= α π
∫ − ω π
α =
π +α+
π
+α
π
cos 2 , 34 V cos 1 , 35 V cos
3 6 V
(V V )d( t)
V
ef L
ef
6 3
6
A B
A velocidade média em regime é determinada por:
φ
α − ω= a
a aa
K
V( ) RI
Como, para excitação independente,
2 a
a
a
a
K
R T
K
V( )
φ
φ
α ω=
O segundo termo determina a queda de velocidade devido ao conjugado
motor, que reflete o conjugado de carga, em regime. Observa-se que para baixos
valores de R (^) a, haverá baixa queda na velocidade e, conseqüentemente, melhor
regulação de velocidade.
Acionamentos Elétricos 5
Conversores Dual
Nesta configuração, tanto corrente como tensão são bidirecionais, permitindo
operação nos quatro quadrantes. Os conversores Dual são a versão estática dos
acionamentos Ward-Leonard (Gerador-Motor).
Conversor dual Ideal
Caracterizado pela ausência de ripple na tensão. Neste caso pode-se
representar os conversores por duas fontes de tensão pura com diodos em série,
determinando fluxo unidirecional da corrente em cada fonte. A tensão de saída de
cada conversor é regulada pela tensão de controle Ec, que determina os ângulos
de gatilhamento. Ambos produzem a mesma tensão terminal, um como retificador
e o outro como inversor.
Acionamentos Elétricos 7
Controle do Ângulo de disparo
Avanço de
o 60 em VA ou utilização de VB a partir de t 1 para gatilhamento do
tiristores da fase A (S 11 e S 21 ).
=− θ
= θ
e K cos
e Kcos
a
'
a
o 1 2 1 2
c 1 2
cos cos 0 sendo: 180
E Kcos Kcos
α + α = α +α =
= α =− α
Acionamentos Elétricos 8
K
E
E E cos V
K
E
E E cos V
c a 2 máx 2 máx
c a 1 máx 1 máx
= α = −
= α =
c
máx a a 1 a 2 E K
V
V =E =−E =
A equação acima mostra que o conversor é um amplificador linear de tensão e
potência
Acionamentos Elétricos 10
Um sistema em malha fechada tem, geralmente, vantagens como grande
precisão, resposta dinâmica otimizada e redução dos efeitos dos distúrbios de
carga.
2.1. Função de transferência do motor de corrente contínua
O modelo elétrico do motor de corrente contínua é representado pela equação
diferencial 1.
dt
di V =E +R i +L
a a a aa a (1)
Onde: E (^) a =Kaφω= Tensão induzida na armadura. (2)
A equação de equilíbrio do conjugado resultante é:
dt
d T =TL+B +J
ω ω
(3)
Onde: T =Ka φi (^) a= Conjugado eletromagnético. (4)
Figura 1. Características Mecânicas: a) motor dc com excitação independente b) motor de indução; c) motor síncrono
Acionamentos Elétricos 11
Figura 2 – Desenvolvimento da função de transferência a) Modelo do motor com
excitação independente b) Diagrama de blocos do motor c) Diagrama
simplificado.
m 1
m1 m
1 s
k ( 1 s )
τ
τ
m
m
1 s
k
Va Ia (s) ω^ (s)
(c)
(a)
(b)
a
a
1 + s
1/R
τ
Ia (s)
1 +s m
1/B
τ
TL (s)
Ka φ
T (s)
Campo
ω (s)
Ka φ
Campo
a (s)
Eg (s)
Va
Acionamentos Elétricos 13
A partir da figura 2b, pode-se obter uma expressão da velocidade em função de
distúrbios na tensão aplicada Va(s) e no conjugado de carga TL(s).
T (s) 1 G(s)H(s)
G (s) V(s) 1 G(s)H(s)
G(s) ù(s) (^) L
2 2
2 a 1 1
1
Onde:
1 + s
( 1 /B)
(K )
1 +s
( 1 /R )
G (s)= m
a a
a 1 τ
φ τ
(11a)
H 1 (s) =Ka φ (11b)
1 s
( 1 /B)
G (s) m
2
(11c)
1 s
(K ) /R
H(s)
a
a
2 a 2
φ = - (11d)
Se considerarmos desprezível o conjugado de carga, por enquanto, pode-se
expressar a velocidade como função da tensão aplicada, usando as equações 11, 11a
e 11b.
(K ) +R B( 1 +s )( 1 +s )
K
V(s)
(s)
a a m
2 a
a
a φ τ τ
ω φ (12)
Se τ (^) a << τm,τa pode ser desprezado, resultando em:
m 1
m
a a m
2 a
a
a 1 +s
k
(K ) +R B+sR B )
K
V(s)
(s)
φ τ τ
ω φ (12a)
m a
2 a
a m 1 (K ) R B
R B
τ φ +
τ = (12b)
(K ) +R B
K
k = a
2 a
a m φ
φ (12c)
τ (^) m 1 < τ m (12d)
Acionamentos Elétricos 14
m
m
m
a
a 1 +s
k
( 1 +s )
K /B
I(s)
(s)
τ τ
ω φ (13)
Entretanto, a partir das equações 12a e 13, tem-se que:
(s)
I(s) × V(s)
(s)
V(s)
I (s) a
a a
a
ω
ω
m 1
m1 m
a m 1
m m
1 + s
k ( 1 +s )
K ( 1 +s )
k B( 1 +s )
τ
τ
φ τ
τ (14)
Então o motor pode ser representado, para o propósito de análise de controle de
tensão de armadura , como dois blocos, como mostrado pela figura 2c. As
constantes de ganho km1, km2 e km3 são definidas como:
K / B
k
(K ) +R B
B
k = a
m
a
2 a
m 1 φ φ
(14a)
B
K
k =
a m
φ (14b)
k (^) m2 =km1k m2 (14c)
A figura 3 representa as funções de transferência da velocidade e corrente de
armadura do motor.
Figura 3 – Modelo do motor com excitação independente : Diagrama simplificado.
3. Dinâmica na regulação de velocidade do motor cc
Relembrando, a equação da velocidade em regime permanente para o motor cc:
m 1
m1 m
1 s
k ( 1 s )
τ
τ
m
m
1 s
k
Va Ia (s) ω^ (s)
Acionamentos Elétricos 16
Dada a elevada constante de tempo elétrica do enrolamento de campo (para
enrolamento independente), não é possível fazer variações rápidas de velocidade
por meio deste controle. Esta é uma alternativa com uso principalmente em tração,
onde as exigências de resposta dinâmica são menores.
Do ponto de vista de um melhor desempenho do sistema, o controle através da
tensão terminal é o mais indicado, uma vez que permite ajustes relativamente
rápidos (sempre limitados pela dinâmica elétrica e mecânica do sistema), além de,
adicionalmente, possibilitar o controle do torque, através do controle da corrente
de armadura. É o método geralmente utilizado no acionamento de MCC em
processos industriais.
Acionamentos Elétricos 17
4. Dinâmica de Velocidade em Malha Fechada
Se um gerador tacômetro ou um encoder é acoplado ao eixo do motor, o sinal
de velocidade real pode realimentar a malha de velocidade e o erro de velocidade
εω é usado para controlar a tensão de armadura. A tensão aplicada é controlada
por conversor dual trifásico. Através de um esquema de gatilhamento adequado
pode-se obter uma relação linear entre a tensão de controle Ec e a tensão de
armadura Va. Se a constante de tempo do conversor é relativamente pequena de
modo que possa ser desprezado, então:
c
LL c c
a
Ê
V k E s
E s
π
= =
3 2
( )
( ) (16)
Onde (^) Ê (^) c corresponde à tensão de controle para ângulo de disparo de 0º e, VLL é
a tensão de linha rms do barramento de entrada.
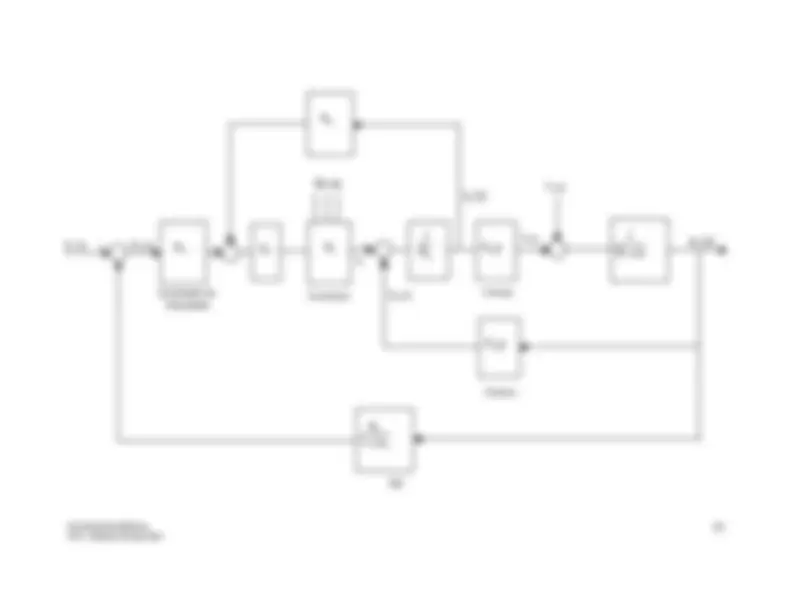
Figura 5 – Malha de Velocidade de um motor de corrente contínua
Ec
Ks Kc
m 1
m1 m
1 s
k ( 1 s )
τ
τ
m
m
1 s
k
Kt
3 φ ac
Motor
Er (s) EN (s)
Controlador de velocidade
Conversor
Va ω^ (s)
Acionamentos Elétricos 19
k k k k k 1
k
s c m 1 m 2 t
m 1 1
τ = (21)
Se k (^) sk ckm 1 km 2 kt >> 1 , então:
t
1 k
k ≅ (22)
s c m 1 m 2 t
m 1 1 k k k k k
τ τ = (23)
A partir das equações 19 e 13:
( 1 s )
( 1 s)
k
k
(s)
I(s)
E(s)
(s)
E(s)
I
1
m
m 2
a 1
r r
a
+τ =
ω
ω = (24)
A resposta de corrente à uma mudança em degrau da entrada Er é:
( 1 s )
( 1 s)
k s
k E I(s) 1
m
m 2
1 r a +τ
+τ
1
1 2
s 1
A
s
A
Onde:
m 2
1 r 1 k
kE A = (26)
τ
τ = 1 k
kE A
1
m
m 2
1 r 2 (27)
Acionamentos Elétricos 20
Logo, no domínio do tempo, a corrente Ia(t) é:
τ
τ −τ = +
τ
− 1
t
1
m 1
m 2
r 1 a e
k
Ek I (t) (28)
Desde que τm >> τ 1 , τ 1 pode ser desprezado. Normalizando a corrente para
regime permanente com Ia(∝):
1
t
1
m
a
a 1 e I ( )
I (t) −τ
τ
τ ≅ + ∞
(29)
A equação 29 mostra que uma variação na entrada Er resulta em uma larga e
brusca mudança na corrente, a qual decrescerá suavemente. Esta sobrecorrente
transitória é indesejável para a operação do conversor (limitações de di/dt).
4.2. Controle de Corrente
Uma análise prévia revela que a necessidade de limitar a corrente em um valor
máximo admissível para o conversor e o acionamento. Este objetivo não seria
atingido com a configuração da figura 5, onde a tensão do motor é controlada pelo
erro de velocidade. Logo, pode-se perceber que a tensão e a corrente serão
limitadas unicamente pelo erro de velocidade.
Entretanto, o limite de corrente pode ser implementado se uma malha interna para
controle da corrente usando a saída do controlador de velocidade como
referência. Ambos, o controlador P e o controlador PI para o controle de corrente
serão analisados a seguir.