Baixe 620 Mechanical Engineering Problems e outras Manuais, Projetos, Pesquisas em PDF para Engenharia Elétrica, somente na Docsity!
Copyright © 1993-2001, Hugh Jack
Engineer On a Disk
Overview: This note set is part of a larger collection of materials available at http://claymore.engi- neer.gvsu.edu. You are welcome to use the material under the license provided at http://clay- more.engineer.gvsu.edu/eod/global/copyrght.html. As always any feedback you can provide will be welcomed.
This section last updated: April 28, 2002
Copyright © 1993-2002, Hugh Jack
email: jackh@gvsu.edu phone: (616) 771- fax: (616) 336-
1. TABLE OF CONTENTS
- TABLE OF CONTENTS..........................................................................................................
- MECHANICAL DESIGN
- BASIC PHILOSOPHY - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- TYPICAL MECHANICAL FUNCTIONS - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- FORCES
- SOME BASIC CONCEPTS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- VECTOR AND SCALAR FORCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- EQUILLIBRIUM....................................................................................................................
- THE BASIC EQUATIONS OF STATICS - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- FREE BODY DIAGRAMS (FBD) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- PRACTICE PROBLEMS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- MOMENTS
- CALCULATING SCALAR AND VECTOR MOMENTS - - - - - - - - - - - - - - - - -
- FORCE COUPLES TO MAKE CENTERLESS MOMENTS - - - - - - - - - - - - - - -
- MECHANISMS......................................................................................................................
- REACTIONS AND SUPPORTS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- EQUILLIBRIUM OF FORCES AND MOMENTS - - - - - - - - - - - - - - - - - - - - - -
- SPECIAL CASES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- STATICALLY INDETERMINATE - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- TRUSSES AND FRAMES.....................................................................................................
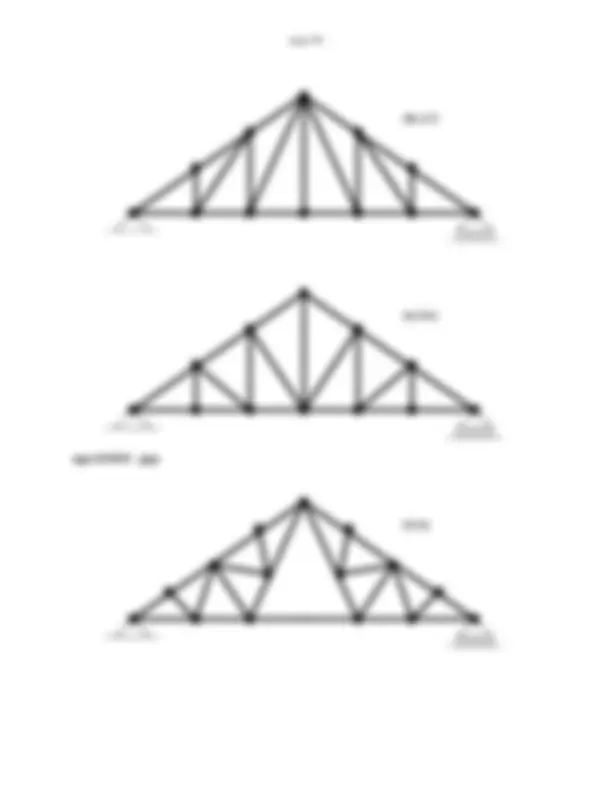
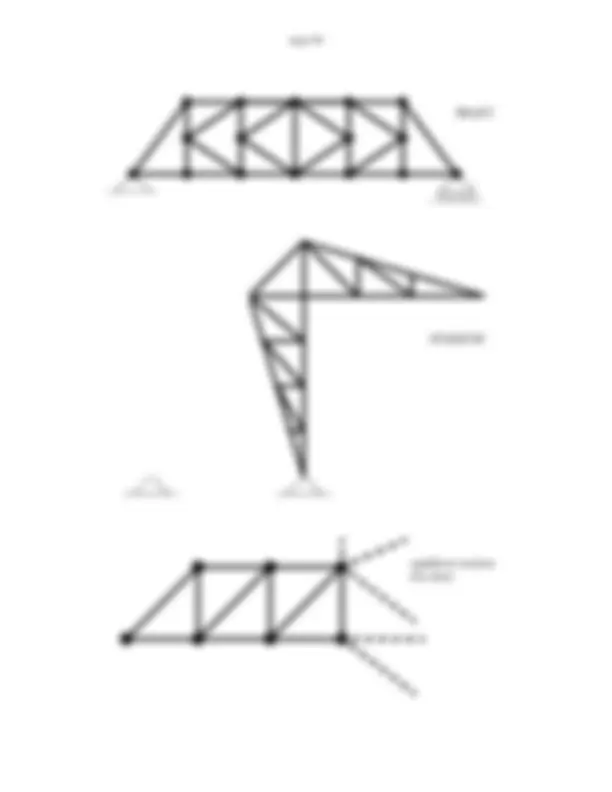
- WHAT ARE TRUSSES? - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- STABILITY OF TRUSSES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- THE METHOD OF JOINTS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- THE METHOD OF SECTIONS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- METHOD OF MEMBERS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- SUMMARY - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- DRY STATIC FRICTION....................................................................................................
- THE BASIC PHYSICS OF FRICTION - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- APPLICATIONS OF FRICTION - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- FORCES
- INTRODUCTION - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- SOME BASIC CONCEPTS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- VECTOR VS. SCALAR QUANTITIES - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- MATH REVIEW - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- RECTANGULAR FORM OF VECTORS - - - - - - - - - - - - - - - - - - - - - - - - - - -
- POLAR FORM OF VECTORS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- EQUILLIBRIUM..................................................................................................................
- INTRODUCTION - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- THE BASIC EQUATIONS OF STATICS - - - - - - - - - - - - - - - - - - - - - - - - - - -
- FREE BODY DIAGRAMS (FBD) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- PRACTICE PROBLEMS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- STRESS
- INTRODUCTION - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- TYPES OF STRESS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- STRESS ANALYSIS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- STRAIN CAUSED BY AXIAL LOADS - - - - - - - - - - - - - - - - - - - - - - - - - - -
- STRESS STRAIN CURVES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- ANALYSIS OF MEMBERS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- GENERALIZED STRESS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- STRESS ON OBLIQUE PLANES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- SHEAR STRAIN - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- POISSON’S RATIO - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- GENERALIZED HOOKES LAW - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- MOMENTS
- INTRODUCTION - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- CALCULATING SCALAR MOMENTS - - - - - - - - - - - - - - - - - - - - - - - - - - -
- CALCULATING VECTOR MOMENTS - - - - - - - - - - - - - - - - - - - - - - - - - - -
- MOMENTS ABOUT AN AXIS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- EQUILLIBRIUM OF MOMENTS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- FORCE COUPLES TO MAKE CENTERLESS MOMENTS - - - - - - - - - - - - - -
- TORSION
- INTRODUCTION - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- THE RELATIONSHIP BETWEEN STRESS AND STRAIN IN TORSION - - - -
- PRACTICE PROBLEMS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- MASS PROPERTIES
- INTRODUCTION - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- CENTRE OF MASS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- CENTROIDS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- FORCES AND MOMENTS ON RIGID BODIES
- INTRODUCTION - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REACTIONS AND SUPPORTS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- EQUILLIBRIUM OF FORCES AND MOMENTS - - - - - - - - - - - - - - - - - - - - -
- SPECIAL CASES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- STATICALLY INDETERMINATE - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- TRUSSES AND FRAMES...................................................................................................
- INTRODUCTION - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- WHAT ARE TRUSSES? - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- STABILITY OF TRUSSES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- THE METHOD OF JOINTS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- THE METHOD OF SECTIONS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- ADDITIONAL TOPICS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- STRESS FAILURE
- FACTOR OF SAFETY - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- STRAIN FAILURE
- POISSON’S RATIO - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- GENERALIZED HOOKES LAW - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- STRESS CONCENTRATIONS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- TORSION STRESS CONCENTRATIONS - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- METHOD OF MEMBERS...................................................................................................
- INTRODUCTION - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- SUMMARY - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- INTERNAL FORCES IN MEMBERS.................................................................................
- INTRODUCTION - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- PRACTICE PROBLEMS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- MOMENTS OF INERTIA
- INTRODUCTION - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- STRESSES IN BEAMS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- MOMENT CURVATURE IN BEAMS - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- EVALUATING THE SECOND MOMENT OF INERTIA - - - - - - - - - - - - - - -
- MOMENTS OF INERTIAS B COMPOSITE AREAS - - - - - - - - - - - - - - - - - -
- POLAR MOMENT OF INERTIA - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REVIEW OF BASIC CALCUATIONS - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- PRODUCT OF INERTIA - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- PURE BENDING
- INTRODUCTION - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- TRANSVERSE SHEAR - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REVIEW OF TRANSVERSE LOADING - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- DRY STATIC FRICTION....................................................................................................
- INTRODUCTION - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- THE BASIC PHYSICS OF FRICTION - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- APPLICATIONS OF FRICTION - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- MASS PROPERTIES
- CENTRE OF MASS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- CENTROIDS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- MOMENTS OF INERTIA - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- PRODUCT OF INERTIA - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- INTERNAL FORCES IN MEMBERS.................................................................................
- STRESS
- TYPES OF STRESS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- STRESS ANALYSIS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- STRESS ON OBLIQUE PLANES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- GENERALIZED STRESS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- FACTOR OF SAFETY - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- STRAIN
- STRAIN CAUSED BY AXIAL LOADS - - - - - - - - - - - - - - - - - - - - - - - - - - -
- STRESS STRAIN CURVES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- ANALYSIS OF MEMBERS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- POISSON’S RATIO - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- GENERALIZED HOOKES LAW - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- SHEAR STRAIN - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- STRESS CONCENTRATIONS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- TORSION - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- TORSION STRESS CONCENTRATIONS - - - - - - - - - - - - - - - - - - - - - - - - - -
- PURE BENDING - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- TRANSVERSE LOADING - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- MECHANISM DYNAMICS................................................................................................
- INTRODUCTION - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- PLANAR - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- PRACTICE PROBLEMS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- VIBRATION
- VIBRATION MODELLING - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- CONTROL - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- VIBRATION CONTROL - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- VIBRATION MEASUREMENT - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- VIBRATION SIGNALS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- VIBRATION TRANSDUCERS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- DEALING WITH VIBRATIONS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- RESOURCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- PRACTICE QUESTIONS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- SOUND/VIBRATIONS TERMS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- INTERNAL COMBUSTION ENGINES
- POWER - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- KINEMATICS AND DYNAMICS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- SOUND CONTROL.............................................................................................................
- BASIC PROPERTIES OF SOUND - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- SOUND MEASUREMENTS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- THE HUMAN EFFECTS OF SOUND - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- NOISE CONTROL REGULATIONS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- SOUND ANALYSIS INSTRUMENTS/TECHNIQUES - - - - - - - - - - - - - - - - -
- EQUIPMENT GENERATED NOISE - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- ROOM ACCOUSTICS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- ENCLOSURES, BARRIERS AND WALLS - - - - - - - - - - - - - - - - - - - - - - - - -
- MATERIALS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- MUFFLERS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- SOUND AND VIBRATION CONTROL STUDIES - - - - - - - - - - - - - - - - - - - -
- AKNOWLEDGEMENTS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- PRACTICE QUESTIONS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- INTRODUCTION TO KINEMATICS OF MECHANISMS
- SOME POPULAR MECHANISMS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- SKELETON DIAGRAMS FOR MECHANISMS - - - - - - - - - - - - - - - - - - - - - -
- DOF AND THE KUTZBACH/GRUEBLER CRITERION - - - - - - - - - - - - - - -
- KINEMATIC/GEOMETRIC INVERSION - - - - - - - - - - - - - - - - - - - - - - - - - -
- GRASHOF’S LAW - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- MECHANICAL ADVANTAGE - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- PRACTICE PROBLEMS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- POSITIONS/DISPLACEMENTS OF POINTS AND MECHANISMS..............................
- MATHEMATICAL TOOLS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- DEFINING POSITIONS AND DISPLACEMENTS - - - - - - - - - - - - - - - - - - - -
- CLOSED LOOP MECHANISMS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- SOLVING FOR POSITIONS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- GRAPHING OF POSITIONS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- DISPLACEMENT, TRANSLATION AND ROTATION - - - - - - - - - - - - - - - -
- PRACTICE PROBLEMS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- MECHANISM VELOCITY
- THE BASIC RELATIONSHIPS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- CALCULATION TECHNIQUES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- INSTANTANEOUS CENTERS OF ROTATION - - - - - - - - - - - - - - - - - - - - -
- PRACTICE PROBLEMS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- MECHANISM ACCELERATION
- THE BASIC DEFINITION - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- INSTANT CENTERS OF ACCELERATION - - - - - - - - - - - - - - - - - - - - - - - -
- PRACTICE PROBLEMS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- LINKAGE SYNTHESIS
- SELECTION OF MECHANISM TYPES - - - - - - - - - - - - - - - - - - - - - - - - - - -
- DESIGN METHODS - SYNTHESIS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- DESIGN METHODS - DIMENSIONAL - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- SPATIAL KINEMATICS
- BASICS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- HOMOGENEOUS MATRICES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- SPATIAL DYNAMICS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- DYNAMICS FOR KINEMATICS CHAINS - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- PRACTICE PROBLEMS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- MECHANICAL COMPONENTS........................................................................................
- CAM DESIGN......................................................................................................................
- CAM TYPES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- CAM MOTION - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- USING CAMS AS JOINTS IN MECHANISMS - - - - - - - - - - - - - - - - - - - - - -
- PRACTICE PROBLEMS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- GEARS
- SPUR GEARS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- HELICAL GEARS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- BEVEL GEARS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- WORM GEARS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- DESIGN OF MECHANISMS
- SIMPLE GEAR TRAINS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- LINKAGES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- PRACTICE PROBLEMS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- STATIC ANALYSIS OF GEARS
- INTRODUCTION - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- ANALYSIS OF GEARS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- PRACTICE PROBLEMS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- MECHANICAL COOKBOOK
- TRANFORMING DEVICES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- REFERENCES - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- A MECHANICAL COOKBOOK
- CONNECTORS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- MOTION/FORCE TRANSMISSIONS - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- POWER TRANSMISSION - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Mechanical Engineering Topics
2.3 REFERENCES
Ullman, D.G., The Mechanical Design Process, McGraw-Hill, 1997.
absorb actuate amplify assemble avoid change channel clear collect conduct control convert couple
decrease disassemble direct dissipate drive fasten guide hold increase interrupt join lift limit
locate move orient position protect release rectify remove rotate secure separate shield start
stop steer store supply support transform translate verify
3. FORCES
- WHAT? - We look at mechanical structures, and determine the distribution of forces and moments.
- WHY? - a fundamental subject for every form of Mechanical Engineering (and every other branch of engineering that has ever existed)
egr20935.jpg
- The difference between statics and dynamics, in brief, Statics - does nothing, just sits there Dynamics - moving things
EX1.WM
- Consider some of the applications of statics design techniques, egr20921.jpg egr20932.jpg egr20926.jpg
e.g., an electric transmission tower
When the weight of the transmission line (a force) is applied, how much force does each part (beam) of the tower carry. How much support is needed on the ground If we do the analysis we can then determine how large the beams must be, but this will be taught in Mechanics of Materials.
- We have both action and reaction forces as well. As we apply action forces, there are forces that will resist, these are called reaction forces.
- Some approximations,
- we are pretending the forces are applied at points, but in reality a force must be distrib- uted,
- we generally assume there are no deflections. This is known as the RIGID BODY assumption.
- we often use particle approximations that assume bodies have no size. This simplifies calculations significantly.
- Transmissibility - a force can be moved along a line of action.
- Parallelogram law - a method for adding two forces to get a resultant vector.
3.2 VECTOR AND SCALAR FORCES
F P
F (^) g
each part of the thread on the screw will trans- mit a bit of the force, and each will be a dif- ferent amount (a very hard problem that is dealt with by finite element methods).
F
- Recall that vectors can be added or subtracted using the paralleloram law. This is a variation or the triangle law. In both cases we are putting vectors head to tail. These methods favor drafting solutions to porblems that are not really necessary with calculators, but they are still very use- ful for understanding.
- vectors can be added to get resultant forces in vector (rectangular component) form.
VECTOR - a magnitude and a direction
SCALAR - a simple quantity (no direction)
e.g. gravity is a vector
e.g. mass is 10 kg
9.81 N
Kg
10 kg
A
B
R=A+B A
B
R=A+B
- we could have also solved this problem using trigonometry.
e.g.
x
y
oil tanker
F R ( 19000 N )
2 ( 5000 N ) 2
- 386 10 6 N 2 = = × = 19646 N
θ F (^) R^5000 N 19000 N
= atan (^) ------------------- =14.7°
θ F (^) R
θ F 1
F 1
F 2
F R
F 1 ( 5000 N )
2 ( 5000 N ) 2
- 50 10 6 N 2 = = × = 7071 N
θ F 1 5000 N 5000 N
= atan (^) ---------------- = 45 °
F 2 ( 14000 N )
2 ( 0 N ) 2 = + = 14000 N
θ F (^) R^0 N 14000 N
= atan (^) ------------------- = 0 °
19646 N ∠14.7°
polar notation
7071 N ∠ 45 °
14000 N ∠ 0 °
3.2.1 Cartesian Vector Notation
F R
F 2
F 1
F 2 = 14000 N
F 1 = 7071 N
F R
2 F 1 2 F 2 2 = + – 2 F 1 F 2 cos 135 °
∴ F R 7071
2 14000 2 = + – 2 7071( ) ( 14000 ) cos 135 °= 19646 N
Given,
We can find the magnitude of FR, using the cosine law
θ F (^) R
We can also find the angle of FR, using the sine law,
F 1 sin θ F (^) R
F R
sin 135 °
∴ θ (^) F (^) R
F 1 sin 135 ° F (^) R
asin (^) -----------------------------^7071 sin^135 ° 14000
= = asin (^) -------------------------------- = 14.7°
19646 N ∠14.7°
- Scalar notation is often made obvious by using ‘x’, and ‘y’, or similar subscripts.
- direction, location, signs, etc. are all defined by convention, and very compact mathematical methods can be used.
- These problems can also be solved using cosine and sine law force additions on force triangles. Considering the last example,
F 1
F 2
F R
x
y
F 1 = 5N
F 2 = 2N
where,
F (^) R (^) x = F 1 cos 20 °+ F 2 cos( 180 ° – 70 °) = 4.0 N
F (^) R (^) y = F 1 sin 20 °+ F 2 sin( 180 ° – 70 °) =3.6 N
F (^) R (^) x = 4.0 N
F (^) R (^) y = 3.6 N
Scalar notation
- Consider the large pendulum below as an example where a force tringle could be used to find the tensions in the cables. egr20928.jpg egr20927.jpg
F R
F 2 =2N
F 1 =5N
φ
use cosine law (we could also use pythagoras) to find FR,
F R
2 F 1 2 F 2 2 = + – 2 F 1 F 2 cos 90 °
F R
2 5 2 2 2 ∴ = + –2 5( ) ( 2 ) ( 0 ) = 29
Next, you can try using the sine law to find the direction angles,