


Mechatronics: An Introduction
Mechatronics:
Modeling, Design, and Control Integration
Sandipan Mishra
Assistant Professor
Rensselaer Polytechnic Institute
S. Mishra













Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Community
Ask the community for help and clear up your study doubts
Discover the best universities in your country according to Docsity users
Free resources
Download our free guides on studying techniques, anxiety management strategies, and thesis advice from Docsity tutors
Lecture Notes 1 for Mechatronics
Typology: Lecture notes
1 / 49

This page cannot be seen from the preview
Don't miss anything!
Mechatronics: An Introduction
S. Mishra
Mechatronics: An Introduction
Mechatronics
The word, mechatronics, is composed of “ mecha ” from mechanism and the “ tronics ” from electronics. In other words, technologies and developed products will be incorporating electronics more and more into mechanisms, intimately and organically, and making it impossible to tell where one ends and the other begins.
“ the synergistic integration of mechanical engineering, with electronics and intelligent computer control in the design and manufacturing of industrial products and processes ”.
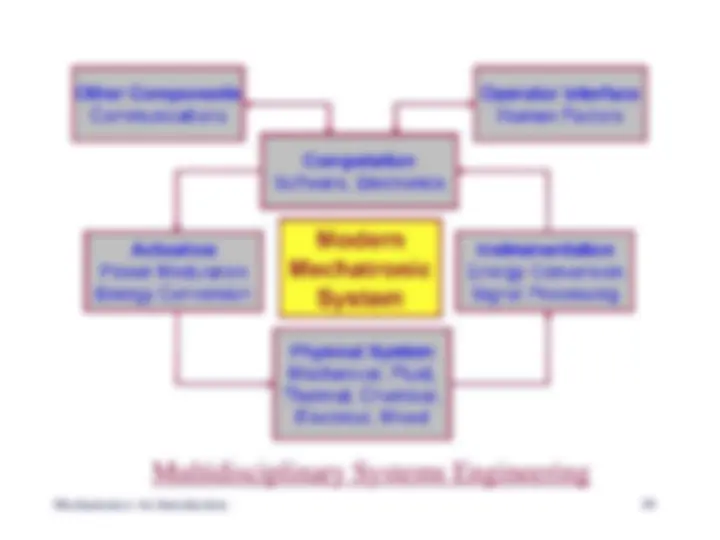
Mechatronics: An Introduction
Bio-mimicry for Sensing
UAV Control
Systems and Control
Synthetic Organ Printing
Additive Manufacturing
Smart Lighting Control
Intelligent Building Systems
SM @ RPI: Research Projects & ISAaC Lab
Micro/Nanoscale Manufacturing: Sensing and Control of E-Jet Printing
Using Image Sensors in High-Speed Applications: High-speed Adaptive Optics using Slow Image Sensors (NSF)
3D Manufacturing for Synthetic Tissue: Synthetic Heterogeneous Anatomical Printer (Army SBIR)
Learning Control Design: Layer-by-layer Manufacturing (NSF CAREER)
Advanced Manufacturing Research
High-speed Imaging
Instrumentation Mechatronics
System Design, Instrumentation, and Integration
1
4
5
6
7 8
3
Layer-to-layer modeling^2 Learning Control
Humidity and Indoor Environment Control: Control of Humidity/Lighting/AQ/Temperature (NSF)
Identification and Modeling of Buildings: Commercial Building Modeling & Control (Hewlett Packard Labs)
Self-Commissioning Smart Lighting Systems: Automated “Plug and Play” – System ID & Control design (NSF)
Learning and Forecasting in Intelligent Buildings: Passivity-based Learning and User-feedback in Control (NSF)
Intelligent Building Systems Research
F K G
ydes y
Inner loop
Outer Learning loop uˆ
w
1
2
3
4
5 User-feedback in Building systems control
Are YOU a good fit for ISAaC?
5/5/
Mechatronics: An Introduction 13
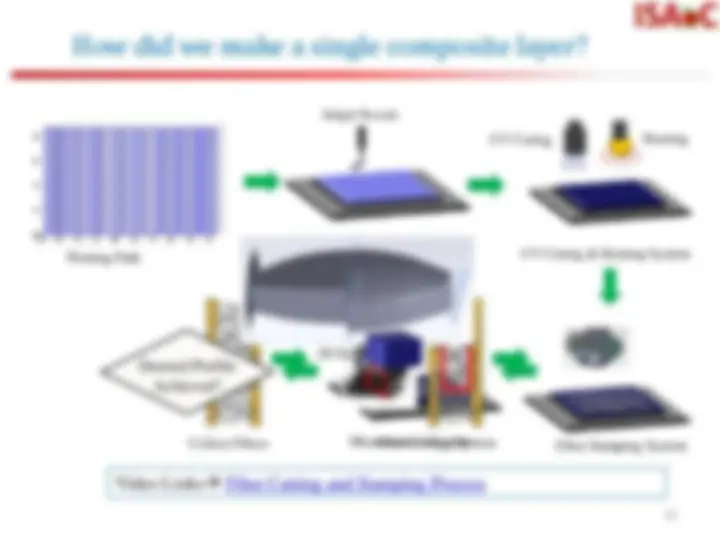
Measurement SystemFiber Cutting System
How did we make a single composite layer?
Printing Path Inkjet Printing System
Inkjet Nozzle
UV Curing & Heating System
UV Curing Heating
Collect Fibers (^) Fiber Stamping System
3D Solid Model Desired Profile Achieved?
Video Links Fiber Cutting and Stamping Process 15
Process Videos
16
Wafer Scan
1/25/2016 18
3.5 4 4.5 5 5.
120
140
160
180
200
220
240
260
WX target (mm)
(^310) 3.5 4 4.5 5 5.
320
330
340
350
360
370
380
390
WY target (mm)
time (sec)
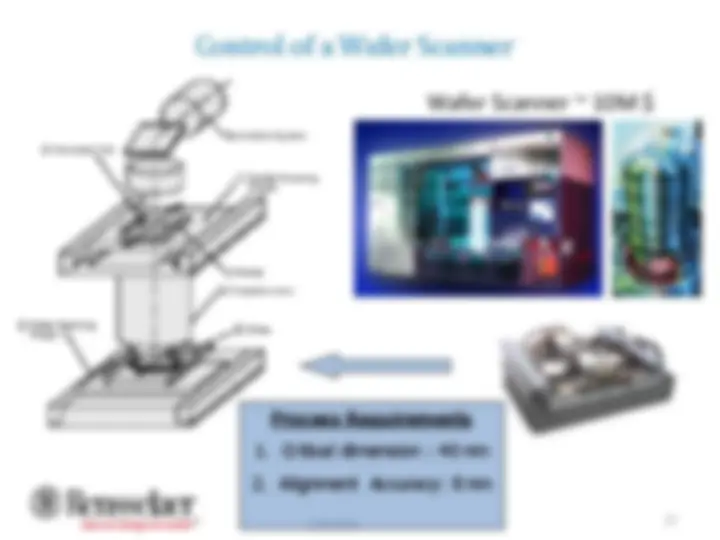
Back X Linear Motor(LM)
Front X LM
Y LM
Wafer Stage
T Guide
X y
z
Nikon Research Center for America
What are the specs for a scanning stage?
1/25/2016 19
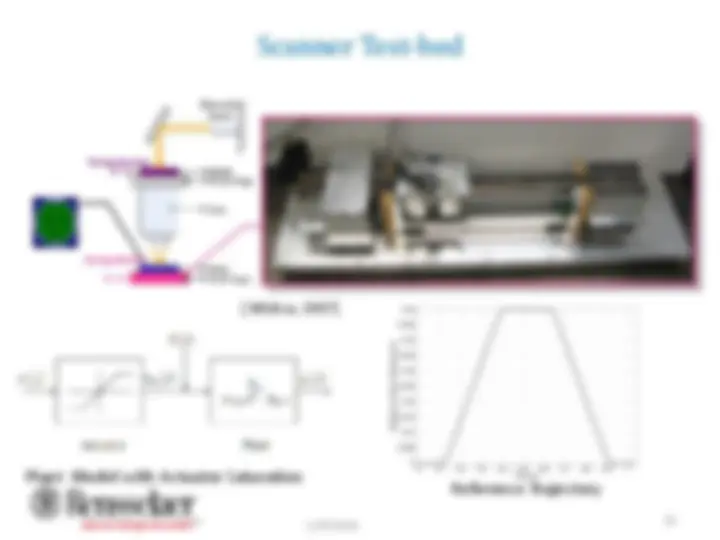
Scanner Test-bed
1/25/2016 21
Plant Model with Actuator Saturation Reference Trajectory
[ Mishra, 2007]
1/25/2016 22
[ Wafer Scanning Test-bed, MSC Lab, UC Berkeley]